 |
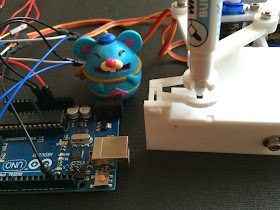
| PlotClock 會寫字了, 筆跡有點醜. |
萊恩大兵第一次去 Openlab.Taipei 時, 當場就被 Time Plotting Clock 的療瘉效果吸引住. 看著機械手臂自動地提筆寫時間, 收筆歸位, 再抹去前次時間, 重新寫下現在時間. 每分鐘每分鐘周而始, 心情都平靜下來了. 好想要一個喔. 就請 Honki 幫忙帶著萊恩大兵, 從零件採購到組裝校正, 一步一步的親手做一個來.
上週有點貪快, 沒先確認 Servo SG90 的轉速有否一致. 還好萊恩大兵夠幸運, 拿到的三個都是轉速 60度/0.13秒, 省掉一部份調校的麻煩.
 |
| 馬爸拿他的神秘盒子逐個測量 Servo SG90 的轉速. |
接線路
- 要讓三組 Servo 的線路連接到 Arduino Uno 時, 會有個小麻煩要克服~ Arduino 只有一個 5V 腳位, 不夠用. 這可以藉由麵包板來擴充腳位解決, 萊恩大兵選擇的方法是銲條一對四的線.

一對四. - 接上 Servo 的訊號線. #lift_servo 接 pin-2, #left_servo 接 pin-3, #right_servo 接 pin-4.

小心不要接錯腳位了.


上軔體 + 校正
就直接記錄馬爸和萊恩大兵所做的調整:
- ln#125 和 ln#127, delay 值調成 5000ms. 這邊是要找出左右兩隻手臂的 x 軸位置. delay 值調長一點, 比較有充裕時間斷電, 好連接上手臂.

- 讓手臂與底座連接在一起.
- ln#22 和 ln#23, 這邊是在調整左右兩隻手臂的 y 軸, 目標是要讓左右手臂轉動時, 剛好呈 90 度. (馬爸的說法是調 “行程”).

- ln#28 和 ln#29, 萊恩大兵還沒參透這數值的意義. (馬爸的說法是調 “中位”).

- 觀察手臂的轉動, 覺得 okay 後, 先用尖剪鉗剪掉旋帽突起來的部份, 才蓋上桌面.

得剪掉旋帽突出的部份才不會頂到桌面. - Mark 掉 calibration mode, 就可以上傳程式, 讓 Time Plotting Clock 提筆寫字了.

- 裝筆的時候發現筆頭大小不對, 要用筆頭 6mm 寬的白板筆. 一般常見白板筆的筆頭是 8mm 寬, 夾臂抓不住.

8mm 頭太大夾不住, 哭哭. - 好不容易買到一隻 6mm 的白板筆.
6mm 剛剛好. - 真的讓它寫字時, 卻發現筆被頂開了. 造成這現象的主要原因是手臂在寫字時, 筆和白板的距離太近, 才導致筆被頂開.

筆被頂開了, 哭哭. - 筆被頂開的另一個原因是夾臂抓筆不夠緊. 萊恩大兵拿膠帶黏了一條繩子在白板筆上, 再把繩子和夾臂綁在一起, 這下夠緊了吧.

把你綁住. - 再來處理手臂寫字的距離~ ln#36.

- 手臂提筆不夠高, 就會拖著筆筒與擦布到處跑. 調整手臂提筆的高度~ ln#38.

筆筒底部黏片不織布, 就可當擦布來用了. - 寫字的時候拖泥帶水, 筆劃連在一起. 調整手臂運筆的高度~ ln#37.

- 再剪片不織布黏在筆筒上.

筆筒是 3D 列印的成品.








到這邊就算調得差不多, 寶貝會寫字了, 只是字跡有點醜就是了.
再來, 就是要讓它字寫漂亮一點, 以及學英文囉.
 |
| 下面音響, 19點40分. |
再來, 就是要讓它字寫漂亮一點, 以及學英文囉.
[萊恩大兵的其它文章]
自製大四軸
* 自製大四軸, 實作分享@華山文創園區
* 自製大四軸, (1) 零組件篇, 遙控器 (Drone, Quadcopter, Futaba, Maker, Arduino, Animatronic Eye)
* 自製大四軸, (2) 零組件篇, 飛控板 (Drone, Quadcopter, MultiWii, Arduino, Futaba, Maker)
* 自製大四軸, (3) 零組件篇, 自行雷切木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (4) 零組件篇, 馬達與電變調整 (Drone, Quadcopter, Maker, Electric Speed Control, Motor)
* 自製大四軸, (5) 組裝篇, 四軸飛行器成形 (Drone, Quadcopter, MultiWii, Arduino, Maker, Electric Speed Control, Motor)
* 自製大四軸, (6) 調整篇, 飛行前兩三事 (Drone, Quadcopter, Maker, Futaba, Arduino, MultiWii)
* 自製大四軸, (7) 充電篇, iMax B6 充電器操作記要 (Charger, Battery)
* 自製大四軸, (8) 問題篇, 機架損壞維修 (Drone, Quadcopter, Laser Cut)
* 自製大四軸, (9) 改良篇, 方便拆卸的木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (10) 外飛篇, 新手的青蛙跳與遛狗 (Drone, Quadcopter, Maker, MultiWii)
自動報球速的棒球
* 自動報球速的棒球, (1) 概念與雛形 (Arduino, MPU-6050, HC-06)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 做實驗, 寫入 EEPROM 的速度能否跟得上 MPU6050 的數據產出? (Arduino, MPU-6050, EEPROM)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
CC2540 Bluetooth Low Energy
* 筆記, CC2540 Bluetooth Low Energy, (1) 開發環境 架設 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
藍色小鋪一起來做
* 藍色小鋪一起來做, (1) 用 beacon 控制開關的枱燈
* 藍色小鋪一起來做, (2) 講解 BLE CC2540 UART 通訊範例程式 (Bluetooth, CC2540, UART)
* 藍色小鋪一起來做, (3) 藍牙枱燈專案實作 (上) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (4) 藍牙枱燈專案實作 (下) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (5) iBeacon scanner 專案示範與解說 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪一起來做, (6) 完成, 用 iBeacon 控制開關的枱燈 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪, 初嚐樹莓派 (Raspberry Pi)
* 藍色小鋪, iBeacon 應用, 自動記錄到訪時間 (iBeacon, Geohopper, Zapier)
小惡魔 無線溫度感測器
* 小惡魔, (1) 溫度感測 + 物聯網 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
108 大眼仔
* 108 大眼仔, 初登場 (Arduino, SG-90, Maker Faire Taipei 2014, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
Plot Clock
* 自造 Time Plotting Clock, (1) 零件採購
* 自造 Time Plotting Clock, (2) 組裝
* 自造 Time Plotting Clock, (3) 校正
* Murmur, 有趣的零件售價
* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* Murmur, Nordic 才會是 Bluetooth LE 晶片戰爭的恐龍王者? (Bluetooth, Nordic)
* 體驗, 原住民互動故事書@宜蘭大同鄉泰雅生活館
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 開箱, 鋼彈小劇場 (Pepper's Ghost, GUNDAM)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉力控二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 筆記, microSD 模組, 一些經驗分享 (Arduino, microSD)
* 筆記, 低電壓警報器的用法 (Low Voltage Buzzer)
* 筆記, 應用 OpenCV 做目標捕獲 (OpenCV, Python)
* 實作, 電容感應音樂樹
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
自製大四軸
* 自製大四軸, 實作分享@華山文創園區
* 自製大四軸, (1) 零組件篇, 遙控器 (Drone, Quadcopter, Futaba, Maker, Arduino, Animatronic Eye)
* 自製大四軸, (2) 零組件篇, 飛控板 (Drone, Quadcopter, MultiWii, Arduino, Futaba, Maker)
* 自製大四軸, (3) 零組件篇, 自行雷切木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (4) 零組件篇, 馬達與電變調整 (Drone, Quadcopter, Maker, Electric Speed Control, Motor)
* 自製大四軸, (5) 組裝篇, 四軸飛行器成形 (Drone, Quadcopter, MultiWii, Arduino, Maker, Electric Speed Control, Motor)
* 自製大四軸, (6) 調整篇, 飛行前兩三事 (Drone, Quadcopter, Maker, Futaba, Arduino, MultiWii)
* 自製大四軸, (7) 充電篇, iMax B6 充電器操作記要 (Charger, Battery)
* 自製大四軸, (8) 問題篇, 機架損壞維修 (Drone, Quadcopter, Laser Cut)
* 自製大四軸, (9) 改良篇, 方便拆卸的木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (10) 外飛篇, 新手的青蛙跳與遛狗 (Drone, Quadcopter, Maker, MultiWii)
自動報球速的棒球
* 自動報球速的棒球, (1) 概念與雛形 (Arduino, MPU-6050, HC-06)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 做實驗, 寫入 EEPROM 的速度能否跟得上 MPU6050 的數據產出? (Arduino, MPU-6050, EEPROM)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
CC2540 Bluetooth Low Energy
* 筆記, CC2540 Bluetooth Low Energy, (1) 開發環境 架設 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
藍色小鋪一起來做
* 藍色小鋪一起來做, (1) 用 beacon 控制開關的枱燈
* 藍色小鋪一起來做, (2) 講解 BLE CC2540 UART 通訊範例程式 (Bluetooth, CC2540, UART)
* 藍色小鋪一起來做, (3) 藍牙枱燈專案實作 (上) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (4) 藍牙枱燈專案實作 (下) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (5) iBeacon scanner 專案示範與解說 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪一起來做, (6) 完成, 用 iBeacon 控制開關的枱燈 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪, 初嚐樹莓派 (Raspberry Pi)
* 藍色小鋪, iBeacon 應用, 自動記錄到訪時間 (iBeacon, Geohopper, Zapier)
小惡魔 無線溫度感測器
* 小惡魔, (1) 溫度感測 + 物聯網 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
108 大眼仔
Plot Clock
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 實作, 電容感應音樂樹
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
* 108 大眼仔, 初登場 (Arduino, SG-90, Maker Faire Taipei 2014, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
* 自造 Time Plotting Clock, (1) 零件採購
* 自造 Time Plotting Clock, (2) 組裝
* 自造 Time Plotting Clock, (3) 校正
* 自造 Time Plotting Clock, (2) 組裝
* 自造 Time Plotting Clock, (3) 校正
* Murmur, 有趣的零件售價
* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* Murmur, Nordic 才會是 Bluetooth LE 晶片戰爭的恐龍王者? (Bluetooth, Nordic)
* 體驗, 原住民互動故事書@宜蘭大同鄉泰雅生活館* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* Murmur, Nordic 才會是 Bluetooth LE 晶片戰爭的恐龍王者? (Bluetooth, Nordic)
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 開箱, 鋼彈小劇場 (Pepper's Ghost, GUNDAM)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉力控二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉力控二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 筆記, microSD 模組, 一些經驗分享 (Arduino, microSD)
* 筆記, 低電壓警報器的用法 (Low Voltage Buzzer)
* 筆記, 應用 OpenCV 做目標捕獲 (OpenCV, Python)
* 筆記, 低電壓警報器的用法 (Low Voltage Buzzer)
* 筆記, 應用 OpenCV 做目標捕獲 (OpenCV, Python)
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
沒有留言:
張貼留言