 |
| arduino * 3 + 大眼仔 * 4, 當我們串在一起 |
萊恩大兵趁空重新走訪這個主題, 本來以為小菜一碟的事, 竟也可以陷坑踢鐵板, 弄了好幾天才總算兜出 (Arduino x 3) + (大眼仔 x 4) 的示範來.
直接說結果. 整個的關鍵點就在於供電.
- I2C bus 吃 arduino 板子上的 3.3V 電源, 自成一個迴路.
- Arduino 板子與大眼仔, 則由外部的電源供應器供給 5V 的電源.
問題來了.
- 線路怎麼接才能供給 (Arduino x 3) + (大眼仔 x 4) 穩定的 5V 電源呢?
答案就是:
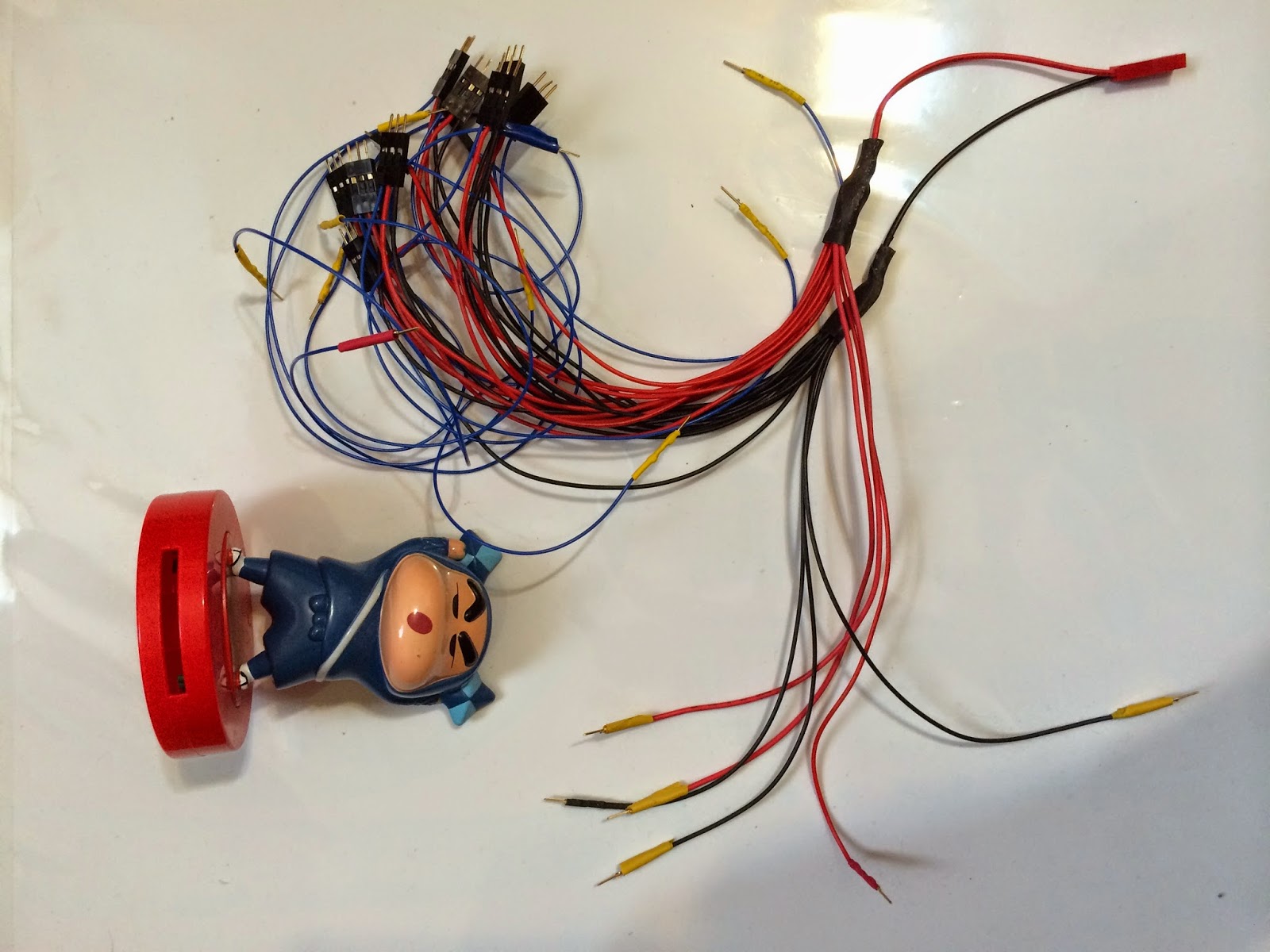
- 改造馬爸做的神奇電源線. 多銲兩組 5V 與 Ground 的電源線.

這條線真好用
 |
| 銲一條 JST 接頭上去 |
 |
| 電源供應器是 maker 的家居必備品 |
Okay, 準備就緒. 把線接好, 打開電源, 從 master device 的 serial port 餵命令進去. 大眼仔果然就動起來了, 成功.
 |
| 透過 serial port 下指令 |
以下是大眼仔 I2C 版本的程式碼與線路圖.
- 線路圖

用一個 servo 來示意大眼仔 - 實際接線圖

只能用盤根錯節來形容了

靠近看.. - 程式碼 (https://github.com/GoGoPrivateRyan/OT108Eyeballs.git)



(for master device)
//
// OT108Eyeballs_i2c_m.ino
// - Use I2C bus to control multiple devices
// - Master device
//
#include <Wire.h>
#include <Servo.h>
#include <AniEyeball.h>
#define N_SLAVE 2
#define N_EYEBALL 2
AniEyeball ot108eyeball[N_EYEBALL];
// %u773C%u76AE_PIN # i
// %u773C%u7403_PIN # i 1
const byte servoPin[N_EYEBALL*2] = {2,3,4,5};
// for command string handling (from serial port)
char inData[80];
byte index = 0;
byte count = 0;
#define NO_PREFIX 0
#define S_PREFIX 1
#define P_PREFIX 1
#define E_PREFIX 1
#define TOKEN_S "s"
#define TOKEN_P "p"
#define TOKEN_E "e"
byte pfxS = NO_PREFIX;
byte pfxP = NO_PREFIX;
byte pfxE = NO_PREFIX;
byte sAll = 0; // all slaves mode
byte sNum = 0; // slave-#
byte pNum = 0; // pattern-#
byte eNum = 0; // eyeball-#
byte fFinish = 0;
void setup()
{
Wire.begin();
Serial.begin(9600);
for (int i=0; i<N_EYEBALL; i )
{
ot108eyeball[i].setPinP(servoPin[i*2]);
ot108eyeball[i].setPinB(servoPin[i*2 1]);
}
}
void loop()
{
while (Serial.available() > 0)
{
char aChar = Serial.read();
if (aChar == '\n')
{
// End of string detected. Time to parse
char *p = inData; //assign the string to *p
int counter = 0; //initialise the counter
String str;
str = strtok(p, ",");
while (str != NULL)
{
Serial.println(str);
ParseCommand(str);
counter ;
str = strtok(NULL, ",");
}
index = 0;
inData[index] = NULL;
Serial.write("done\n");
}
else
{
inData[index] = aChar;
index ;
inData[index] = '\0'; // Keep the string NULL terminated
}
}
if (fFinish)
{
// 全部命令解析完成, 來操控 slave 吧
if (sAll)
{
for (int i=0; i<N_SLAVE; i )
{
//
// 暫且忽略 e 命令吧, 以後有空再補上
//
Wire.beginTransmission(i 1);
Wire.write(pNum);
Wire.endTransmission();
}
}
else
{
// 特定 salves
Wire.beginTransmission(sNum);
Wire.write(pNum);
Wire.endTransmission();
}
// 不光是 slave 要做事, master 自己也要做啊.
for (int i=0; i<N_EYEBALL; i )
{
ot108eyeball[i].acting(pNum);
}
resetFlags();
}
// if no inputs from remote, how about letting master device's eyeballs moving
// tweeting();
}
void ParseCommand(String str)
{
// the input commands formats:
// * s
// - all: all slaves
// - (num): slave-#(num)
// * e
// - (num): eyeball-#(num)
// * p
// - (num): pattern-#(num)
//
// the command example:
// s,all,p,1 -> all slaves, run pattern-1
// s,5,e,1,p,3 -> slave-5, eyeball-1, run pattern-3
// s,5,p,3 -> slave-5, all eyeballs, run pattern-3
if (str == TOKEN_S && pfxS == NO_PREFIX) // 開始 s 命令
{
pfxS = S_PREFIX;
}
else if (str == "all" && pfxS == S_PREFIX) // s 命令, all
{
sAll = 1;
pfxS = NO_PREFIX; // s 命令結束
}
else if (pfxP == NO_PREFIX && pfxE == NO_PREFIX && pfxS == S_PREFIX) // 仍在解析 s 命令, 尚未走到 p 或 e 命令
{
sNum = str.toInt();
pfxS = NO_PREFIX; // s 命令結束
}
else if (str == TOKEN_E && pfxE == NO_PREFIX && pfxP == NO_PREFIX && pfxS == NO_PREFIX) // 開始 e 命令
{
pfxE = E_PREFIX;
}
else if (str == TOKEN_P && pfxP == NO_PREFIX && pfxE == NO_PREFIX && pfxS == NO_PREFIX) // 開始 p 命令
{
pfxP = P_PREFIX;
}
else if (pfxE == E_PREFIX && pfxP == NO_PREFIX && pfxS == NO_PREFIX) // 解析 e 命令的參數
{
eNum = str.toInt();
pfxE = NO_PREFIX; // e 命令結束
}
else if (pfxP == P_PREFIX && pfxE == NO_PREFIX && pfxS == NO_PREFIX) // 解析 p 命令的參數
{
pNum = str.toInt();
pfxP = NO_PREFIX; // p 命令結束
fFinish = 1;
}
}
void resetFlags()
{
pfxS = NO_PREFIX;
pfxP = NO_PREFIX;
pfxE = NO_PREFIX;
sAll = 0;
sNum = 0;
pNum = 0;
eNum = 0;
fFinish = 0;
}
(for slave device)
//
// OT108Eyeballs_i2c_s.ino
// - Use I2C bus to control multiple devices
// - Slave device
//
#include <Wire.h>
#include <Servo.h>
#include <AniEyeball.h>
#define N_EYEBALL 1
AniEyeball ot108eyeball[N_EYEBALL];
// 眼皮_PIN # i
// 眼皮_PIN # i+1
const byte servoPin[N_EYEBALL*2] = {2,3};
const int SLAVE_ADDRESS = 2;
char inByte = 0;
void setup()
{
Wire.begin(SLAVE_ADDRESS); // join I2C bus as a slave with address 1
Wire.onReceive(receiveEvent); // register event
Serial.begin(9600);
for (int i=0; i<N_EYEBALL; i )
{
ot108eyeball[i].setPinP(servoPin[i*2]);
ot108eyeball[i].setPinB(servoPin[i*2 1]);
}
}
void loop()
{
// 可能要有緩衝, 以免灌進太多指令, 來不及處理
if (inByte)
{
for (int i=0; i<N_EYEBALL; i )
{
ot108eyeball[i].acting(inByte);
}
inByte = 0;
}
else
{
//ot108eyeball[i].tweeting();
}
}
void receiveEvent(int howMany)
{
// master 傳來的命令格式為一數值, 代表 pattern-#.
while (Wire.available())
{
inByte = Wire.read();
}
}
話說, 這個程式碼有幾個可以改進的地方. 萊恩大兵留著以後慢慢改吧.
- command parser, 可改用 shifting bits 的方法來做.
- 沒處理 e command.
再下來, 萊恩大兵要想辦法讓大眼仔做人臉追蹤了.
[參考資料]
[萊恩大兵的其它文章]
自製大四軸
* 自製大四軸, 實作分享@華山文創文區
* 自製大四軸, (1) 零組件篇, 遙控器 (Drone, Quadcopter, Futaba, Maker, Arduino, Animatronic Eye)
* 自製大四軸, (2) 零組件篇, 飛控板 (Drone, Quadcopter, MultiWii, Arduino, Futaba, Maker)
* 自製大四軸, (3) 零組件篇, 自行雷切木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (4) 零組件篇, 馬達與電變調整 (Drone, Quadcopter, Maker, Electric Speed Control, Motor)
* 自製大四軸, (5) 組裝篇, 四軸飛行器成形 (Drone, Quadcopter, MultiWii, Arduino, Maker, Electric Speed Control, Motor)
* 自製大四軸, (6) 調整篇, 飛行前兩三事 (Drone, Quadcopter, Maker, Futaba, Arduino, MultiWii)
* 自製大四軸, (7) 充電篇, iMax B6 充電器操作記要 (Charger, Battery)
* 自製大四軸, (8) 問題篇, 機架損壞維修 (Drone, Quadcopter, Laser Cut)
* 自製大四軸, (9) 改良篇, 方便拆卸的木質機架 (Drone, Quadcopter, Maker, Laser Cut)
自動報球速的棒球
* 自動報球速的棒球, (1) 概念與雛形 (Arduino, MPU-6050, HC-06)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 做實驗, 寫入 EEPROM 的速度能否跟得上 MPU6050 的數據產出? (Arduino, MPU-6050, EEPROM)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
CC2540 Bluetooth Low Energy
* 筆記, CC2540 Bluetooth Low Energy, (1) 開發環境 架設 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
藍色小鋪一起來做
* 藍色小鋪一起來做, (1) 用 beacon 控制開關的枱燈
* 藍色小鋪一起來做, (2) 講解 BLE CC2540 UART 通訊範例程式 (Bluetooth, CC2540, UART)
* 藍色小鋪一起來做, (3) 藍牙枱燈專案實作 (上) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (4) 藍牙枱燈專案實作 (下) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (5) iBeacon scanner 專案示範與解說 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪一起來做, (6) 完成, 用 iBeacon 控制開關的枱燈 (Bluetooth, CC2540, iBeacon)
小惡魔 無線溫度感測器
* 小惡魔, (1) 溫度感測 + 物聯網 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
108 大眼仔
* 108 大眼仔, 初登場 (Arduino, SG-90, Maker Faire Taipei 2014, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
Plot Clock
* Murmur, 有趣的零件售價
* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* 體驗, 原住民互動故事書@宜蘭大同鄉泰雅生活館
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 開箱, 鋼彈小劇場 (Pepper's Ghost, GUNDAM)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉控力二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 實作, 電容感應音樂樹
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
自製大四軸
* 自製大四軸, 實作分享@華山文創文區
* 自製大四軸, (1) 零組件篇, 遙控器 (Drone, Quadcopter, Futaba, Maker, Arduino, Animatronic Eye)
* 自製大四軸, (2) 零組件篇, 飛控板 (Drone, Quadcopter, MultiWii, Arduino, Futaba, Maker)
* 自製大四軸, (3) 零組件篇, 自行雷切木質機架 (Drone, Quadcopter, Maker, Laser Cut)
* 自製大四軸, (4) 零組件篇, 馬達與電變調整 (Drone, Quadcopter, Maker, Electric Speed Control, Motor)
* 自製大四軸, (5) 組裝篇, 四軸飛行器成形 (Drone, Quadcopter, MultiWii, Arduino, Maker, Electric Speed Control, Motor)
* 自製大四軸, (6) 調整篇, 飛行前兩三事 (Drone, Quadcopter, Maker, Futaba, Arduino, MultiWii)
* 自製大四軸, (7) 充電篇, iMax B6 充電器操作記要 (Charger, Battery)
* 自製大四軸, (8) 問題篇, 機架損壞維修 (Drone, Quadcopter, Laser Cut)
* 自製大四軸, (9) 改良篇, 方便拆卸的木質機架 (Drone, Quadcopter, Maker, Laser Cut)
自動報球速的棒球
* 自動報球速的棒球, (1) 概念與雛形 (Arduino, MPU-6050, HC-06)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (2) 第一版試作品 (Arduino, NanoWii, microSD, MPU6050)
* 自動報球速的棒球, (3) 拋接實驗的數據分析 (Arduino, NanoWii, microSD, MPU6050)
* 做實驗, 寫入 EEPROM 的速度能否跟得上 MPU6050 的數據產出? (Arduino, MPU-6050, EEPROM)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
* 筆記, NanoWii, 一些經驗分享 (Arduino, NanoWii, MPU6050)
* Murmur, 很小很強大的穿戴式裝置模組 (Realtag, Bluetooth, CC2540, MPU6050, BMP180)
CC2540 Bluetooth Low Energy
* 筆記, CC2540 Bluetooth Low Energy, (1) 開發環境 架設 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
* 筆記, CC2540 Bluetooth Low Energy, (2) 跑第一個範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (3) SimpleBLEPeripheral 簡單介紹 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (4) 在智慧手機上執行範例程式 (Bluetooth, CC2540)
* 筆記, CC2540 Bluetooth Low Energy, (5) 偵測與發送 iBeacon 訊號 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 發訊器 x 防丟器 (Bluetooth, CC2540, iBeacon)
* 實作, iBeacon 尋寶遊戲 (Bluetooth, CC2540, iBeacon, iOS app)
* 實作, BLE + iOS app, 遙控燈泡君 (Bluetooth, CC2540, iOS app)
* 做實驗, 用 iBeacon 做自動控制的可行性 (Bluetooth, iBeacon, CC2540, Automation, URL Scheme, iOS app)
藍色小鋪一起來做
* 藍色小鋪一起來做, (1) 用 beacon 控制開關的枱燈
* 藍色小鋪一起來做, (2) 講解 BLE CC2540 UART 通訊範例程式 (Bluetooth, CC2540, UART)
* 藍色小鋪一起來做, (3) 藍牙枱燈專案實作 (上) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (4) 藍牙枱燈專案實作 (下) (Bluetooth, CC2540)
* 藍色小鋪一起來做, (5) iBeacon scanner 專案示範與解說 (Bluetooth, CC2540, iBeacon)
* 藍色小鋪一起來做, (6) 完成, 用 iBeacon 控制開關的枱燈 (Bluetooth, CC2540, iBeacon)
小惡魔 無線溫度感測器
* 小惡魔, (1) 溫度感測 + 物聯網 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
* 小惡魔, (2) 溫度感測 + 物聯網 + 事件觸發 (Electric Imp, Xively, LM35, Internet of Things)
108 大眼仔
Plot Clock
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 實作, 電容感應音樂樹
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
* 108 大眼仔, 初登場 (Arduino, SG-90, Maker Faire Taipei 2014, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (1) 專屬程式庫 (Arduino, SG90, Animatronic Eye)
* 108 大眼仔, 進化, (2) 當我們串在一起 (Arduino, SG90, Animatronic Eye, I2C)
* 108 大眼仔, 進化, (3) 檢查 Gmail 信箱 (Arduino, SG90, Animatronic Eye, Temboo)
* 108 大眼仔, 進化, (4) 看著我的臉 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 進化, (5) 迎著人來人往 (Arduino, SG90, Animatronic Eye, OpenCV, Processing, I2C)
* 108 大眼仔, 檢討筆記, 我要一個打十個 (Arduino, SG90, Animatronic Eye)
* Murmur, 有趣的零件售價
* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* 體驗, 原住民互動故事書@宜蘭大同鄉泰雅生活館* Murmur, Arduino 保險桿 (Arduino, bumper, 3D printing)
* Murmur, 許一個 maker 分享網站
* Murmur, 物聯網新概念- The Physical Web (Internet of Things, The Physical Web)
* Murmur, 關於 HP Sprout 的一點想法
* Murmur, 說中文很難嗎? (Toy, Reed Switch, Voice Recorder Module)
* Murmur, 停車場自動繳費機的兩三事 (Kiosk)
* Murmur, 為什麼是 WiFi? 關於小米空氣清淨器的一點看法.. (Internet of Things)
* Murmur, 機器人是時尚元素? (Robot, Fashion)
* 體驗, 蛋生音互動裝置@兒童美術館 (Arduino, 3D Printing, HC-SR04, Interactive)
* 開箱, 鋼彈小劇場 (Pepper's Ghost, GUNDAM)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉控力二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 開箱, 偉力控二號機, 小四軸飛行器 (CG022, Quadcopter)
* 偉力控二號機, 修理防護罩與飛行心得 (CG022, Quadcopter)
* 偉力控二號機, 我想有個家 (CG022, Quadcopter)
* 偉控力二號機, 換馬達 (CG022, Quadcopter)
* 偉力控二號機, 盒子上的洞 (CG022, Quadcopter)
* 修理, 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, (part 2) 樂高馬達 8883 (LEGO 8883 Power Functions M-Motor)
* 修理, 液晶螢幕 (LCD)
沒有留言:
張貼留言